نیاز به نقشه های سه بعدی از شهرها و شبکه جاده ای پیوسته رو به افزایش است و غالباً سیستم های نقشه برداری متحرک برای اخذ داده های چنین نماهایی ترجیح داده می شوند. پردازش دستی ابرهای نقطه ای به کاری فشرده نیاز دارد و بنابراین زمان بر و پر هزینه است. این مقاله بر روش های طبقه بندی خودکار به روز و نقشه برداری سه بعدی از عوارض جاده ای از طریق ابرهای نقطه ای اخذ شده به وسیله سامانه های نقشه برداری متحرک تمرکز داشته و امکان پذیر بودن استخراج اطلاعات نماها به منظور افزایش دقت طبقه بندی را بررسی می نماید.
مدیریت جاده ها نیازمند در دست داشتن اطلاعات از شرایط روکش جاده ها، علائم جاده ای و عوارض حاشیه جاده شامل دکل های برق، علائم ترافیکی و تیرهای چراغ برق است. تراکم نقطه ای بالای ابرهای نقطه ای اخذ شده از طریق سامانه های نقشه برداری متحرک (MMSها) امکان تهیه نقشه از فلش های راهنمای ترافیک و خطوط نقاشی شده روی سطح جاده، عوارض جاده ای قائم، ترک ها و سوراخ های سطح جاده، و پستی و بلندی ها را فراهم می کند. عوارض جاده ای قائم به دلیل شکل طویل و غالباً گسترش یافته در راستای قائم، به عنوان عوارض دکلی (PLOها) شناخته می شوند. در هنگام انجام نقشه برداری با سرعت ترافیک، تداخلی در کار دیگر استفاده کنندگان از جاده صورت نمی گیرد و این به حفظ ایمنی در جاده ها کمک می کند. در نتیجه، MMSها به یک فناوری برداشت داده های محبوب برای تهیه اطلاعات جاده ها در طول 15 سال اخیر بدل شده اند.
سامانه های نقشه برداری متحرک
یک سامانه نقشه برداری متحرک معمولاً روی وسیله نقلیه ای که امکان حرکت با سرعت ترافیک در جاده ها و بزرگراه ها را داشته باشد، سوار می شود. یک MMS از یک سامانه تعیین موقعیت و توجیه (POS)، یک یا چند اسکنر لیزری، یک یا چند دوربین رقومی و یک واحد کنترلی تشکیل شده است. نحوه نصب یک MMS در شکل 1 نشان داده شده است. بخش بدون دوربین MMS سامانه اسکن لیزری متحرک (MLS) نامیده می شود. POS بطور پیوسته داده ها را برای محاسبه پارامترهای توجیه خارجی (سه مختصات و سه زاویه ارتفاعی) با استفاده از یک گیرنده GNSS و یک واحد اندازه گیری اینرسی (IMU)، که غالباً با یک شمارنده دوار چرخ شکل کامل می شوند، اخذ می نماید. هر اسکنر لیزری پالس هایی را برای اخذ سطح جاده و عوارض بالا و کنار آن، ارسال می کند، در حال حاضر امکان ارسال تا یک میلیون پالس در ثانیه وجود دارد. فاصله میان سنجنده و عارضه از طریق زمان سیر پالس ها محاسبه می شود.
اسکنر لیزری در درجه اولفاصله، زاویه اسکن و شدت بازگشت پالس را اندازه گیری می کند. ترکیب این اندازه گیری ها با داده های حاصل از گیرنده GNSS، IMU و شمارنده چرخان، مختصات سه بعدی میلیون ها و یا حتی بیلیون ها نقطه را در یک سیستم مختصات ملی و یا محلی ارائه می دهد. معمولاً این سنجنده ها در یک سکوی محکم با هم ادغام شده اند و فاصله میان آنها باید کالیبره شود. این عملیات غالباً توسط تولید کننده به انجام می رسد. لرزش های ناشی از حفره های سطح جاده و کاهش سرعت های ناگهانی در طول نقشه برداری موجب جابجایی سنجنده ها و اختلالاتی دیگر می شوند. برای ضمانت انجام نقشه برداری ها با دقت بالا در تمامی زمان ها و شرایط، سامانه نیاز به کالیبره نمودن بصورت منظم دارد. علاوه بر مختصات سه بعدی، یک یا چند توصیف دیگر را نیز می توان به هر نقطه اختصاص داد. این توصیفات می توانند مستقیماً توسط سنجنده اندازه گیری شوند، این امر بطور خاص به شدت بازگشت محاسبه شده از یک همسایگی نقاط و یا بدست آمده از دیگر منابع، مرتبط است. مقادیر RGB می توانند با ثبت همزمان تصاویر رقومی و یا منابع تصویری دارای برچسب های زمانی دیگر به نقاط لیزری اختصاص یابند. این توصیفات به عنوان ویژگی ها برای شناسایی خودکار عوارض عمل می کنند.
شناسایی خودکار عوارض
نیاز به روش های نقشه برداری خودکار انگیزه ای فوق العاده برای پژوهش در حوزه های فتوگرامتری، سنجش از دور و بینایی ماشین در طول دهه اخیر بوده است. طبقه بندی ابرهای نقطه ای به سمت نقشه سازی سه بعدی، که تعریف کننده عوارض مورد نظر در نماهای جاده ای پروژه جاری و اختصاص برچسب کلاس به این عوارض است، رو نموده است. دستور کار طبقه بندی خودکار و نقشه سازی از نماهای جاده ای معمولاً با مجزا نمودن نقاط زمینی از نقاط بالای سطح زمین آغاز می شود. شکل 2 یک دستور کار معمول که اخیراً توسط Yang و همکارانش (2017) پیشنهاد شده است را نشان می دهد. اگر تهیه نقشه از سطوح و علائم جاده ای بخشی از عملیات نقشه برداری نباشد، جدا کردن نقاط زمینی و نقاط بالای سطح آن منجر به کاهش فوق العاده نقاط در پردازش ها می شود.
مراحل بعدی به نوع نماها و ترجیحات محققان بستگی دارد. روش های مختلف می توانند در سه گروه اصلی طبقه بندی شوند: طبقه بندی نقطه ای، طبقه بندی مبتنی بر قطعه بندی، و طبقه بندی چند مقیاسه. طبقه بندی نقطه ای شدت بازگشت و/یا شکل و دیگر مشخصات هندسی در مجاورت هر نقطه را مورد استفاده قرار می دهد. ویژگی های هندسی به هریک از نقاط اختصاص می یابند و سپس گروه بندی و طبقه بندی می شوند. روش های مبتنی بر قطعه بندی مناسب صفحات، کره ها، استوانه ها و یا دیگر محیط های هندسی در همسایگی های نقاط هستند. پارامترهای توصیف کننده این قطعات به عنوان ویژگی هایی برای گروه بندی، طبقه بندی و نقشه سازی های بعدی مورد استفاده قرار می گیرند.
سه گروه مورد بحث واقع شده به شدت به محاسبه ویژگی های هندسی در خلال بکارگیری ساختار هندسی محلی بستگی دارند. تلاش های صوت گرفته برای طبقه بندی خودکار ابرهای نقطه ای MLS اساساً بر اختصاص کلاس های از پیش مشخص شده به نقاط منفرد تمرکز داشته اند. روش های نقطه ای نسبت به روش های مبتنی بر قطعه بندی نسبت به انسداد و در هم ریختگی مقاوم ترند، در حالیکه روش دوم مقاومت بیشتری در برابر نویز و تراکم نقطه ای متغیر نشان می دهد. در نتیجه، روش های نقطه ای ممکن است با اختصاص کلاس های اشتباه به نقاط مواجه شوند. اگرچه، روش های مبتنی بر قطعه بندی نیز نتایج اشتباهی را در نتیجه حساسیت به انسداد و در هم ریختگی ارائه می نمایند. منظور از انسداد آن است که بخشی از یک عارضه در نتیجه حضور دیگر عوارض در خط دید از موقعیت مکانی سنجنده قابل مشاهده نباشد. مثالی از در هم ریختگی اختلاط قطعات متعلق به یک عارضه با قطعات دیگر عوارضی است که بسیار به آن نزدیک بوده و یا با آن همپوشانی دارند.
ساختار هندسی محلی
علاوه بر مختصات سه بعدی در یک سیستم مرجع منطقه ای، ملی و یا محلی، معمولاً تنها مقدار بازتابیده از هر نقطه (که در قالب عددی رقومی بین 0 تا 255 ارائه می شود)، در یک ابر نقطه ای در دسترس است. در نتیجه، بسیاری از روش های طبقه بندی، بر غنی سازی توصیفات متناسب با مقادیر RGB حاصل از تصاویر، که ممکن است همیشه در اختیار نباشند و سنجش ساختار هندسی محلی مجموعه ای از نقاط مجاور تکیه دارند. ساختار هندسی محلی بر اساس این مشاهده که بسیاری از عوارض شکل متفاوتی دارند، مناسب است. به عنوان مثال، اکثر ساختمان ها می توانند به عنوان مجموعه ای از صفحات که در بیشتر موارد در خطوط گوشه ای بر هم عمودند، مدل سازی شوند، حال آنکه خطوط انتقال نیرو را می توان به عنوان المان هایی خطی مدل سازی کرد.
دو توصیف کننده بنیادی برای بیان شکل یک سطح وجود دارد: بردارهای نرمال و مقادیر ویژه. هر دو از طریق ارزیابی پیکربندی نقطه مورد نظر و نقاط مجاورش، به هریک از نقاط اختصاص می یابند. بنابراین، محاسبه بردارهای نرمال و مقادیر ویژه از طریق ارزیابی مختصات سه بعدی یک همسایگی از نقاط انجام می شود. اگر بردارهای نرمال یک همسایگی از نقاط در یک راستا باشند، احتمالاً این همسایگی محلی یک صفحه را تشکیل می دهد. اگر این بردارها به گونه ای سیستماتیک واگرا باشند، احتمالاً یک کره و یا استوانه تشکیل می شود. زمانی که الگوی سیستماتیک در هیچ راستایی موجود نباشد، نقاط بازتاب دهنده یک سطح مبهم مانند شاخ و برگ درختان هستند.
مقادیر ویژه ماتریس کواریانس 3*3 مختصات سه بعدی نقاط مجاور نیز می توانند مشخص کننده شکل باشند. اگر یک مقدار ویژه بزرگ و دوتای دیگر نزدیک به صفر باشند، این همسایگی یک خط را تشکیل می دهد. یک صفحه از طریق دو مقدار ویژه که مقدار تقریباً مشابهی دارند و یک مقدار ویژه نزدیک به صفر مشخص می شود. سطوح کروی و یا مبهم دارای سه مقدار ویژه بزرگ خواهند بود. استخراج اندازه مقادیر ویژه برای مشخص نمودن نوع ساختار محلی روشی معمول است. مثال هایی از چنین سنجه هایی عبارتند از: خطی بودن، صفحه ای بودن، کروی بودن، ناهمگونی، بی نظمی، و تغییرات ساختار محلی.
یادگیری عمیق
نوآوری های اخیر در حوزه بینایی ماشین و AI شامل توسعه الگوریتم های یادگیری عمیق بر مبنای شبکه های عصبی در هم پیچیده (CNNها) است. توسعه این نوع از روش های یادگیری ماشین از شیوه کار مغز انسان الهام گرفته است. در مقالات علمی مشهور غالباً ادعا می شود که یک CNN مغز را شبیه سازی می کند، اما همانطور که نمی توان اظهار داشت که هواپیما قادر به شبیه سازی پرواز پرنده است، این ادعا نیز صحیح نیست. CNNها بطور موفقیت آمیز در ماشین های خودران، رباتیک و شناسایی عارضه در تصاویر بکار گرفته شده اند. اگرچه، به نظر می رسد که طبقه بندی ابرهای نقطه ای به دلیل حجم عظیم نقاط و پیچیدگی های نماهای بیرونی کار مشکلی باشد. علاوه بر این نقاط مانند یک تصویر رستری دارای ساختار ماندگاری نیستند و توزیع آنها در فضا نامنظم و ناهمگن است.
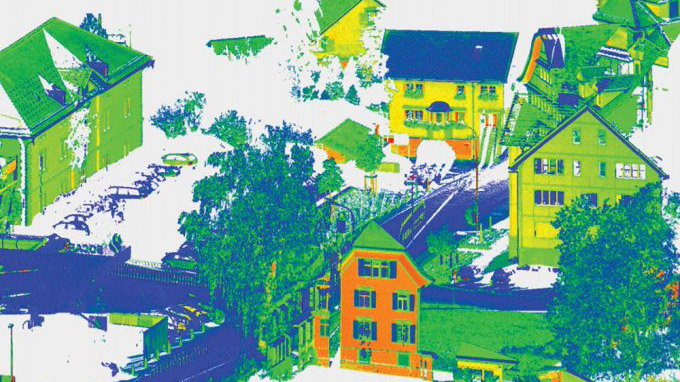
از طریق تغذیه CNN با عوارض نمونه فراوان، الگوریتم قادر به شناسایی عوارض در گستره وسیعی از نماها خواهد بود. اگرچه، داده های آموزشی باید بصورت دستی انتخاب شوند که در مدل های سه بعدی نسبت به دو بعدی زمان و هزینه بیشتری را صرف می کند. اخیراً، ETH Zurich سوئیس از حصول یک بنچ مارک طبقه بندی ابر نقطه ای بزرگ مقیاس با بیش از 4 بیلیون نقطه برچسب گذاری شده بصورت دستی و بدست آمده از طریق اسکنرهای لیزری زمینی خبر داد (semantic3d.net). این بنچ مارک در بردارنده نماهای شهری و روستایی اخذ شده در اروپای مرکزی و نشان دهنده معماری اروپایی معمول شامل تالارهای شهری، ایستگاه های راه آهن، بازارها و غیره است (شکل 3). این بنچ مارک بصورت رایگان در دسترس عموم قرار داشته و منبعی ارزشمند برای ارزیابی عملکرد دستورکارهای طبقه بندی موجود و یا پیشنهاد شده است.
مولفه ارتفاع
در حقیقت، از آنجایی که ابرهای نقطه ای در تعداد توصیفاتی که مستقیماً در خلال نقشه برداری قابل مشاهده هستند، محدود می باشند، جستجوی یک همسایگی محلی در پروسه تخصیص کلاس به نقاط منفرد اجتناب ناپذیر است. در مورد نقشه سازی سه بعدی از نماهای خارجی، ارتفاعات بالای یک سطح مبنا، مثلاً سطح زمین، مهمترین دارایی یک ابر نقطه ای به شما رفته و باید از این اطلاعات بطور کامل بهره گرفت. البته، یافتن ارتفاعات در بالای سطح زمین به عنوان یک مولتفه ارتفاعی به خودی خود عملی نیست. بسیاری از نقاط بازتابیده از علائم ترافیکی، نماهای ساختمانی، تیرهای چراغ برق، ماشین ها، عابران پیاده و درختان همگی ممکن است دارای ارتفاع یکسانی باشند. بنابراین، ارتفاع بالای سطح زمین به سختی از میان کلاس های مختلف قابل تشخیص است و برای طبقه بندی مناسب نیست.
روشی که ممکن است کارا باشد بر مبنای مشاهدات نقاط بالای سطح زمین در نماهای شهری است که توسط سامانه MLS جمع آوری شده اند و غالباً بخشی از عوارضی هستند که در راستای قائم گسترش یافته اند. یکی از مشخصات این عوارض ارتفاعات متفاوت آنهاست. به عنوان مثال، یک نمای ساختمانی ارتفاعات مختلفی را ارائه می نماید که ممکن است از 7 متر یا بیشتر، بسته به منطقه شهری شروع شود، در حالیکه ارتفاع یک علامت ترافیکی سوار شده روی یک دکل معمولاً از سه متر بالاتر از سطح زمین تجاوز نمی کند. بکارگیری مولفه ارتفاع موضوع تحقیقات جاری است، به کار Zheng و همکارانش (2017) نگاهی بیندازید. به علاوه، اطلاعات نماها می توانند برای ارزیابی و بهبود نتایج طبقه بندی مورد استفاده قرار گیرند.
اطلاعات نماها
انواع مختلفی از عوارض ممکن است دارای ویژگی های هندسی مشابهی باشند. در نتیجه، زمانی که تنها از این ویژگی استفاده می شود، ممکن است نتایج در پروسه تخصیص کلاس در معرض آشفتگی قرار گیرند. برای اجتناب از این مساله، طبقه بندی تنها به بکارگیری مختصات سه بعدی یک همسایگی محلی از نقاط وابسته بوده و یک اطلاعات نمایی اولیه نیز می تواند به دستورالعمل طبقه بندی اضافه شود. بنابراین، برای بهبود نتایج طبقه بندی می توانیم قانون مشخصه نمایی شماره یک را معرفی نماییم: جاده ها و بخش های مجاور آنها ساخت بشر هستند، این به معنای آن است که موقعیت عوارض، شکل آنها، اندازه و راستای آنها باید از ضوابط ترافیک جاده ای، طرح های کارشناسی، و دیگر الزامات رسمی پیروی نمایند. در نتیجه، عوارض جاده ای نظیر گاردریل ها و علائم ترافیکی در منطقه ای که تقریباً موازی راستای اصلی جاده است ظاهر می شوند، و فاصله آنها با جاده تنها در یک محدوده بخصوص تغییر می کند. به علاوه، راستای علائم ترافیکی نصب شده روی دکل ها معمولاً عمود بر جهت جاده است.
قانون مفید دوم آن است که هر چیزی به یک چیز دیگر و در نهایت به سطح زمین متصل است. این قانون کلی می تواند در قالب یک قید هندسی بیشتر مشخص شود: عوارض جاده ای معمولاً در راستای قائم گسترش یافته اند و ارتفاع آنها در یک دامنه خاص قرار می گیرد. به علاوه، توزیع تعداد بازگشت ها از علائم ترافیکی به اندازه و شکل آنها وابسته است. عوارض جاده ای غالباً در الگوهای منظمی واقع می شوند. این اطلاعات می توانند برای بهبود تخصیص کلاس ها مورد استفاده قرار گیرند. به عنوان مثال، در طول جاده، تیرهای چراغ برق در فاصله منظمی از یکدیگر قرار گرفته اند. به تازگی، Yang و همکارانش (2017) از اطلاعات نماها در کنار ترکیبی از روش های نقطه ای و مبتنی بر قطعه بندی استفاده نموده و دریافته اند که دستور کار طبقه بندی آنها نسبت به دیگر روش ها نتایج بهتری را در تخصیص برچسب کلاس ها ارائه می کند.
نتیجه گیری
در حدود سال 2003 سامانه های اسکن لیزری متحرک برای نقشه برداری و نقشه سازی سه بعدی از نماهای جاده ای وارد فاز عملیاتی شدند. امروزه سامانه های MLS برای برداشت اطلاعات جاده ها و بخش های مجاور آنها و به منظور تهیه فهرست اطلاعات مرتبط بصورت منظم بکار گرفته می شوند. همچنین، نوآوری های جالبی در حال وقوع هستند، یکی از این مسائل افزایش آگاهی در ارتباط با بکارگیری ابرهای نقطه ای به عنوان نوع سوم مدل داده ای در کنار ارائه های رستری و برداری است. نرخ برداشت نقاط و همچنین تعداد سامانه های تجاری MLS عملیاتی پیوسته رو به افزایشند. اگرچه، داده ها هنوز اطلاعات به شمار نمی آیند (مرحله تبدیل آنها نیازمند پروسه ای دقیق است که مشخصات مراحل مختلف آن به دامنه کاربردی و نوع نماها بستگی دارد). پیش از آنکه حجم عظیم نقاط امکان تبدیل شدن به نقشه بصورت کاملاً خودکار را داشته باشند، راه درازی پیش روی ماست.
منبع : www.geomatics-world.co.uk











دیدگاه بگذارید
You must be logged in to post a comment.