
هند در بزنگاه زیرساختی واقع شده است. در نتیجه رشد نیاز به توسعه زیرساخت ها، رشد بی وقفه این کشور از توانایی های آن در توسعه و تحویل تعداد پروژه های زیرساختی لازم پیشی گرفته است.
در کشورهای در حال توسعه، نیاز ضروری رشد اقتصادی و توسعه پایدار، پیش شرط ارائه خدمات زیرساختی ارزان قیمت، قابل اعتماد و کاراست. یک شبکه بزرگراهی و جاده ای خوب نیاز زیرساختی ضروری برای توسعه اقتصادی کشور است.
نیاز هند به توسعه بزرگراه ها با دقتی کمتر از 2 سانتیمتر است و تنها تجهیزات فوق دقیق نقشه سازی متحرک HiScan-S تولید شده توسط Hi-Target توان پاسخگویی به این نیاز را دارد.
در این مطالعه موردی، ما بزرگراهی در شرق دهلی را که دارای سطحی ناهموار است را انتخاب کردیم. تحت نیاز به تبدیل 4 خط به 6 خط در این بزرگراه، بکارگیری ابر نقطه ای گردآوری شده توسط HiScan-S برای فراهم آوردن تقاطعات و عوارض نقطه ای و خطی ضروری است.
سامانه نقشه سازی متحرک فوق دقیق HiScan-S از یک اسکنر Z+F 9012 که با فرکانس تا 1.01 میلیون نقطه در ثانیه، ابر نقطه ای بسیار متراکمی را به وجود می آورد، استفاده می کند. عملکرد یکپارچه و پیوسته IMU/GPS تعیین موقعیت دقیق را تا سطح 1-2 سانتیمتری که برای بازسازی و توسعه بزرگراه ها در هند کافیست، ارائه می نماید.

سامانه نقشه سازی متحرک فوق دقیق HiScan-S
پیش از جمع آوری داده ها، نیاز به چند نقطه کنترل داریم. هر 600 متر یکبار، یک نقطه کنترل با دقت مسطحاتی 3 سانتیمتری و ارتفاعی 2 سانتیمتری باید اندازه گیری شود. نقاط کنترل برای تصحیح خطای ارتفاعی و ارزیابی دقت مورد استفاده قرار می گیرند.
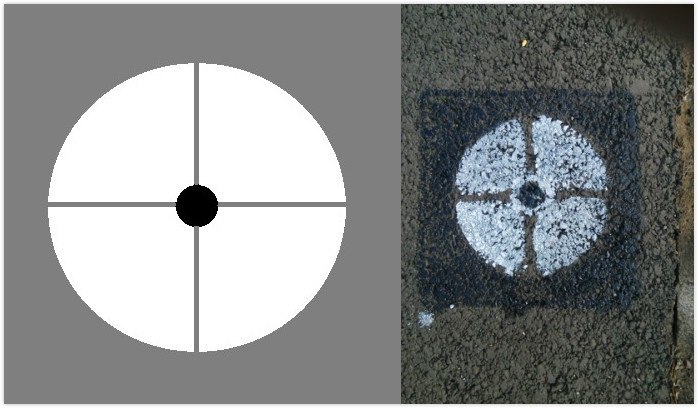
نقاط کنترل
همچنین، داده ها نقشه ای را برای انجام نقشه برداری زمینی، تایید جمع آوری شرایط ترافیکی جاده، رابطه میان خطوط جمع آوری داده ها و علائم نقشه ای آماده کردیم تا برنامه ریزی کار منطقی باشد. موقعیت ایستگاه های مبنا، موقعیت راستای POS، و مسیر حرکت، باید در حین پیشرفت کار ثبت شوند تا از باقی ماندن در منطقه سیگنال دهی مناسب GNSS اطمینان حاصل گردد.

بزرگراهی در دهلی
لطفاً ایستگاه مبنا را در منطقه ای باز انتخاب کنید تا از حفظ دقت اخذ داده ها توسط HiScan-S اطمینان حاصل کنید. همچنین بهتر است فاصله بین ایستگاه مبنا و HiScan-S کمتر از 20 کیلومتر باشد.
برای جمع آوری داده ها سه مرحله باید به انجام برسند:
- همگرایی زاویه مسیر
وسیله نقلیه باید تا جایی که زاویه مسیر به 0.1 درجه همگرا شود، شتاب خود را کم و زیاد نموده و در جهات مختلف دور بزند.
- جمع آوری داده های POS
پس از اخذ داده های POS و پیش از شروع جمع آوری داده های پروژه، بر مبنای نیازمندی های اخذ داده باید نسبت به انجام تنظیمات پارامترها شامل پارامترهای اسکنر، حالت شاتر دوربین، و پارامترهای نوردهی دوربین،اقدام نمود.
- جمع آوری داده های پروژه
پس از هم راستا نمودن POS و فرآیند تناسب بخشی پارامترها، اخذ داده های پروژه آغاز می گردد. در انتها و پس از تکمیل پروسه جمع آوری داده ها، آنها را از HiScan-S روی لپتاپ خود کپی نمایید.

همکار هندی در حال نصب HiScan-S
فرآیند پسا پردازش داده ها برای راه حل نقشه سازی متحرک HiScan-S، بخشی بسیار مهم است و شامل 5 مرحله زیر است:
- پردازش داده های خام
داده های خام جمع آوری شده توسط HiScan پس از پردازش امکان بکارگیری توسط دیگر اپلیکیشن ها را دارند. پردازش داده ها خام شامل راه حل POS و راه حل ترکیبی است.
- محاسبات POS
راه حل POS عمدتاً بر مبنای محاسبات ترکیبی داده های ایستگاه مبنا و POS (داده های GPS + داده های IMU + داده های مسافت سنج HiScan) است و برای دست یابی به داده های موقعیتی فوق دقیق، نرم افزار ترکیبی خروجی مورد نیاز است.
در راه حل POS بیشتر بر پردازش داده های ایستگاه مبنا و راه حل IE تاکید می گردد. پردازش داده های ایستگاه مبنا برای تبدیل داده های اصلی به فرمت متناظر انجام می گردد و سپس، این داده ها با داده های HiScan برای بدست آوردن داده های موقعیتی با دقت بالا ترکیب می شوند.
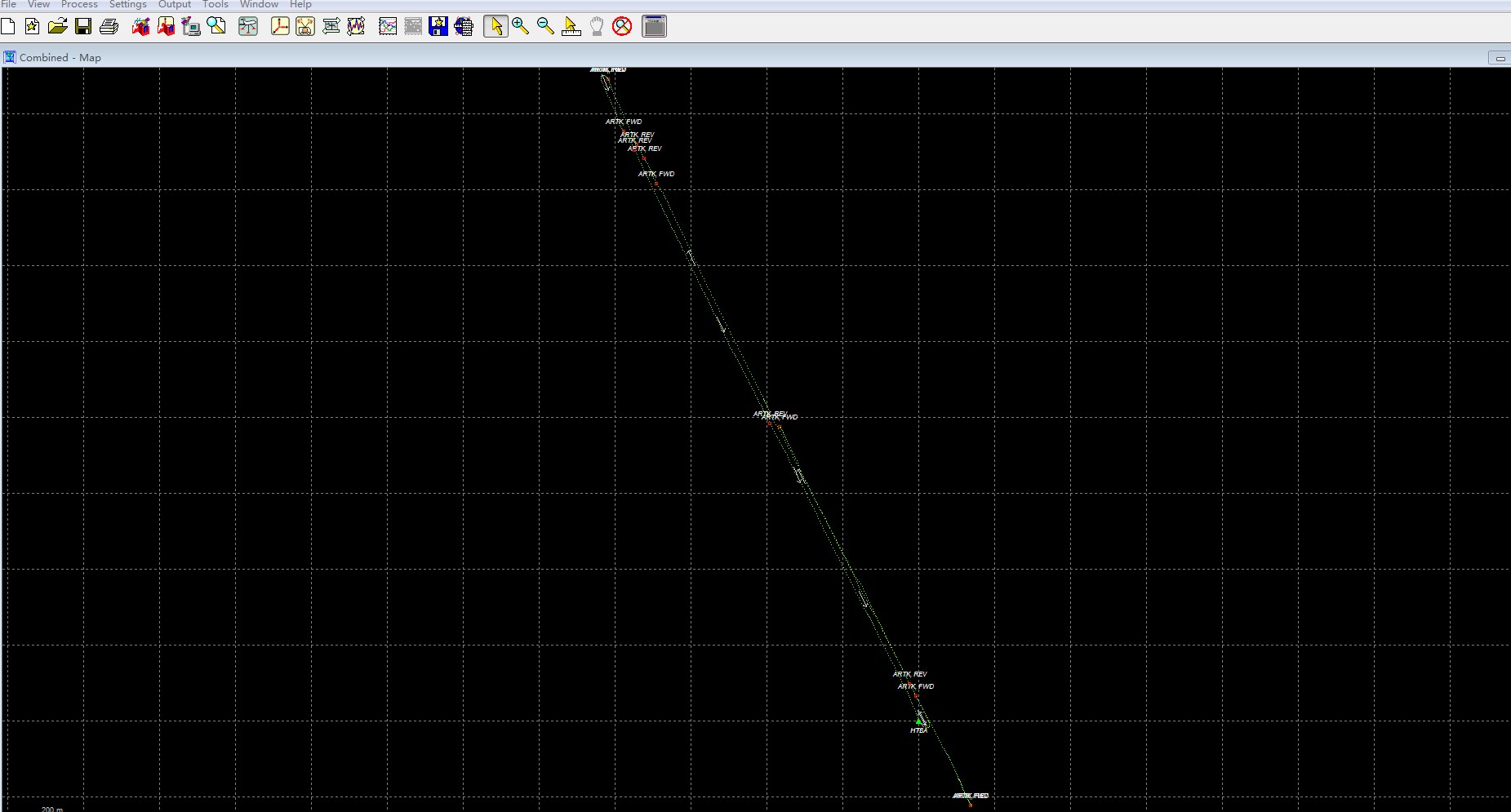
نتایج محاسبات POS
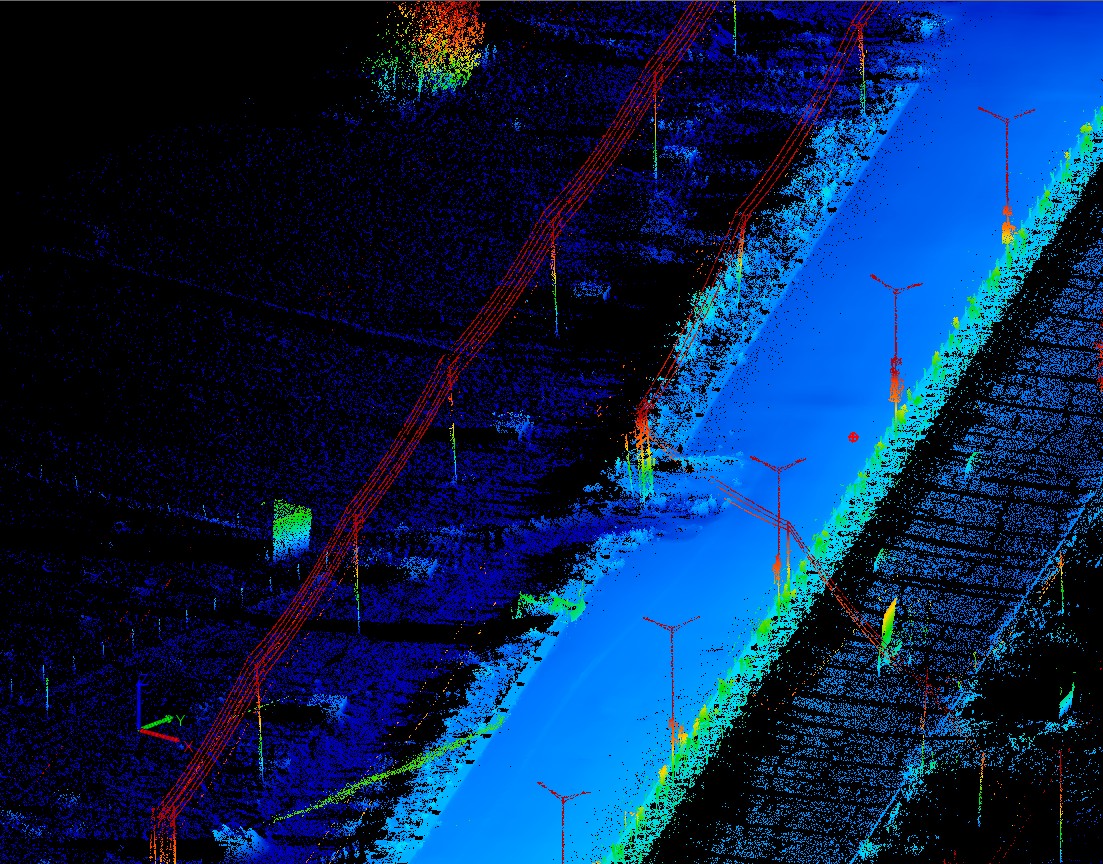
- محاسبات ترکیبی
زمانی که سامانه قشه سازی متحرک داده های اندازه گیری شده توسط هر سنجنده را ثبت می نماید، تطبیق و ترکیب این داده ها بر اساس مدل اندازه گیری (پارامترهای زمانی و موقعیتی هر سنجنده) به منظور بازیابی مختصات هندسی سه بعدی و توزیع عوارض اندازه گیری شده، لازم است. محاسبات ترکیبی پروسه ای است که داده های خام جمع آوری شده توسط HiScan را دریافت نموده و داده های ابر نقطه ای را برای پردازش های بعدی در مجموعه دیگری از نرم افزارها تولید می نماید.
- ارزیابی دقت
پس از حاصل شدن ابر نقطه ای،ارزیابی دقت این نقاط ضروری است. مختصات نقاط کنترل متناظر در ابر نقطه ای را انتخاب کنید و گزارش ارزیابی دقت بدست آمده از طریق مقایسه مختصات این نقاط را بررسی نمایید. برای مناطقی که دقت متناسب با نیاز پروژه نیست، از موقعیت نقاط کنترل برای اصلاح POS استفاده کنید.
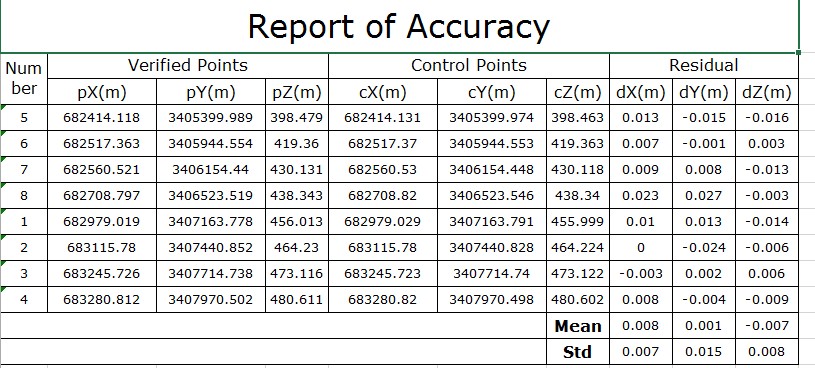
گزارش ارزیابی دقت
- اصلاح داده های POS
نقاط کنترل معلوم در مسیر حرکت HiScan را برای تعدیل مختصات دیگر نقاط اسکن شده به منظور بهبود دقت سامانه نقشه سازی متحرک، بکار گیرید. در پردازش داده های حاصل، به منظور بهبود دقت سامانه نقشه سازی متحرک و برآروده ساختن نیازهای دقت اندازه گیری در توسعه بزرگراه، مختصات این نقاط کنترل را در پروسه تعدیل با مختصات محاسبه شده از طریق ابر نقطه ای جایگزین نمایید.
در این مرحله و پس از کسب اطمینان از مطابقت داده های ابر نقطه ای با دقت مورد نیاز پروژه، از هر نرم افزار سفارشی شده برای توسعه جاده، به منظور استخراج خودکار و یا شبه خودکار داده های لازم برای توسعه بزرگراه، شامل تقاطعات جاده ای، پروفیل طولی و عرضی، و عوارض نقطه ای و خطی استفاده کنید.
استخراج پروفیل های طولی و عرضی
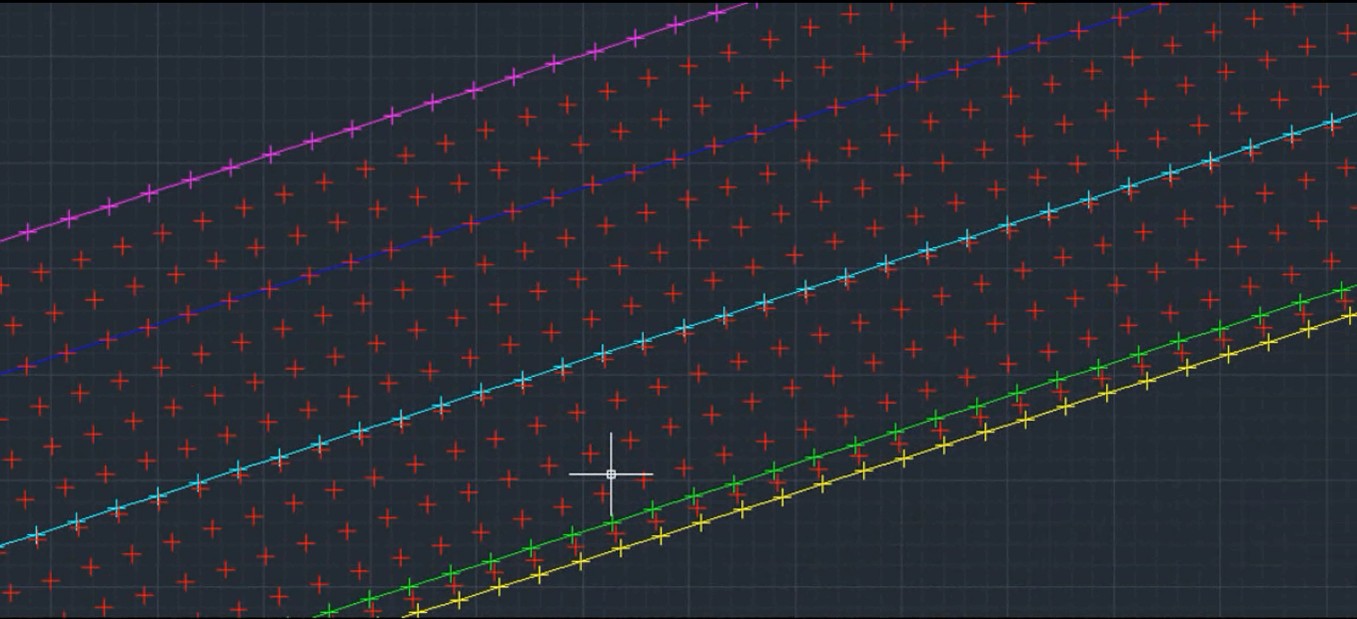
استخراج عوارض نقطه ای و خطی
مشتریان امتیاز بالایی را به نرم افزار عملیاتی، پسا پردازش داده ها و دقت ما داده اند، چرا که بکارگیری نرم افزار ما ساده بوده و مراحل پسا پردازش را با سرعت و دقت بالا انجام می دهد. دقت ابر نقطه ای حاصل از نرم افزار ما کمتر از 2 سانتیمتر است که نیازهای پروژه توسعه بزرگراه را برآورده می سازد.
منبع: www.hi-target.com











دیدگاه بگذارید
You must be logged in to post a comment.